杠杆ganggan
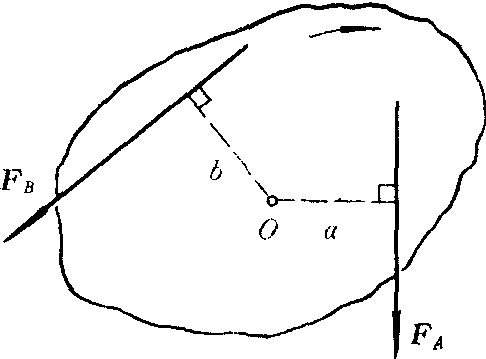
在动力和阻力的作用下能够绕着一固定点或一定轴转动的刚性杆。如图所示是一个具有任意形状的杠杆,O是支点,FA是动力,FB是阻力,a和b分别是FA和FB对O点的力臂。当杠杆平衡时,由力矩平衡条件可得FA/FB=b/a,说明作用在杆杠上两力的大小同它们的力臂成反比,称为杠杆原理,又称杠杆平衡条件。应用机械功原理也可得到这一结论。动力对杠杆做功的同时,杠杆也对外做功,在不考虑摩擦力所引起的能量消耗时,输入功等于输出功。另一方面,输入力可以不等于输出力,使用杠杆时,只要适当调整动力臂和阻力臂的比例,就能用小力获得大力,或改变运动的速度或方向,或以小移动变为大移动,给工作带来方便。实际使用的杠杆多种多样,它的外形有直的也有弯曲的,或者是各式各样的。有等臂的也有不等臂的。按支点、动力点和阻力点的位置不同,把杠杆分为三类:第一类杠杆——支点在中间,动力点和阻力点在其两端,如天平;第二类杠杆——阻力点在中间,支点和动力点在其两端,如瓶盖起子;第三类杠杆——动力点在中间,支点和阻力点在其两端,如镊子。各类杠杆的作用各不相同,第一、二类杠杆能够用作增力机械,所以得到了广泛的应用,例如撬杠、钳子、划船的桨、开罐头起子等。第三类杠杆不能增力,但能增加位移,利用这个特点可制成有用的工具,例如筷子、镊子等。
杠杆Ganggan
在动力和阻力作用下能够绕着固定点转动的刚性杆。杠杆是一种增力机械,利用杠杆可以以小力获得大力。如图1所示,杠杆AB可绕支点O转动,A为动力作用点,B为阻力作用点,动力FA和阻力Fs对支点的力臂分别为a和b,当杠杆平衡时,由力矩平衡条件,可得FAa=FBb,或FA/FB=b/a,即作用在杠杆上的两个力的大小与它们的力臂成反比。这称为杠杆原理,又称杠杆平衡条件。显然,为了省力,应当用动力臂比阻力臂长的杠杆;为了省距离,应使用阻力臂比动力臂长的杠杆;等臂杠杆既不省力又不省距离。根据以上特点,在实际应用中适当调整动力臂与阻力臂的比例,就能满足生产、生活中的不同需要。杠杆的种类有多种多样,它的结构不一定是一根直棒,支点也不一定在动力点和阻力点之间。按照支点、动力点和阻力点间相互位置的不同,可将杠杆分为三类。第一类杠杆的支点在中间,例如秤或天平、汽车上的脚踏离合器、克丝钳等。第二类杠杆的阻力点在中间,例如核桃夹、瓶盖启子等。第三类杠杆的动力点在中间,例如镊子、筷子等。前两类杠杆可作为增力机械,后一类杠杆可用来增大距离。
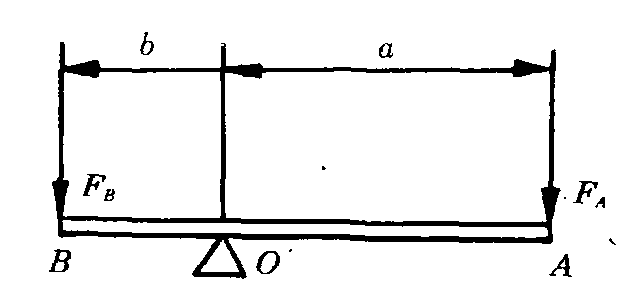
图1 杠杆
为便于演示杠杆的作用和平衡条件,可按图2自制一演示用的杠杆,在杆上等距地标上刻度,刻度下方装上螺丝圈以便吊上钩码,杆中心处钻一孔作为轴心,杠杆两端装有可调节的平衡螺母。为明显起见,可在演示过程中挂上标有物理量的小纸旗。
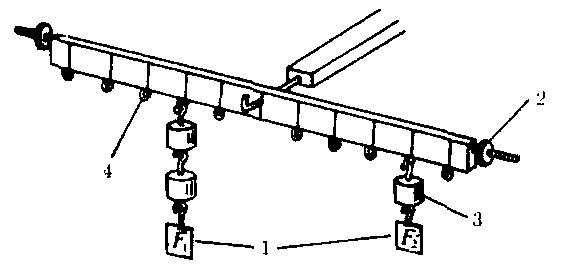
1.小旗 2.调平螺母 3.砝码头 4.羊眼螺丝圈
图2
更为简单的演示,是用演示米尺作为杠杆,如图3所示,将其放在三棱木块的棱上,另用一些同样质量的圆柱体或方块作为砝码进行演示。
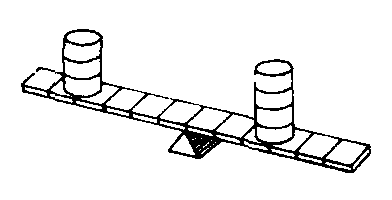
图3